
2024 - Crescendo
C#
District Rank: --
Total District Points: --
All data provided by The Blue Alliance 
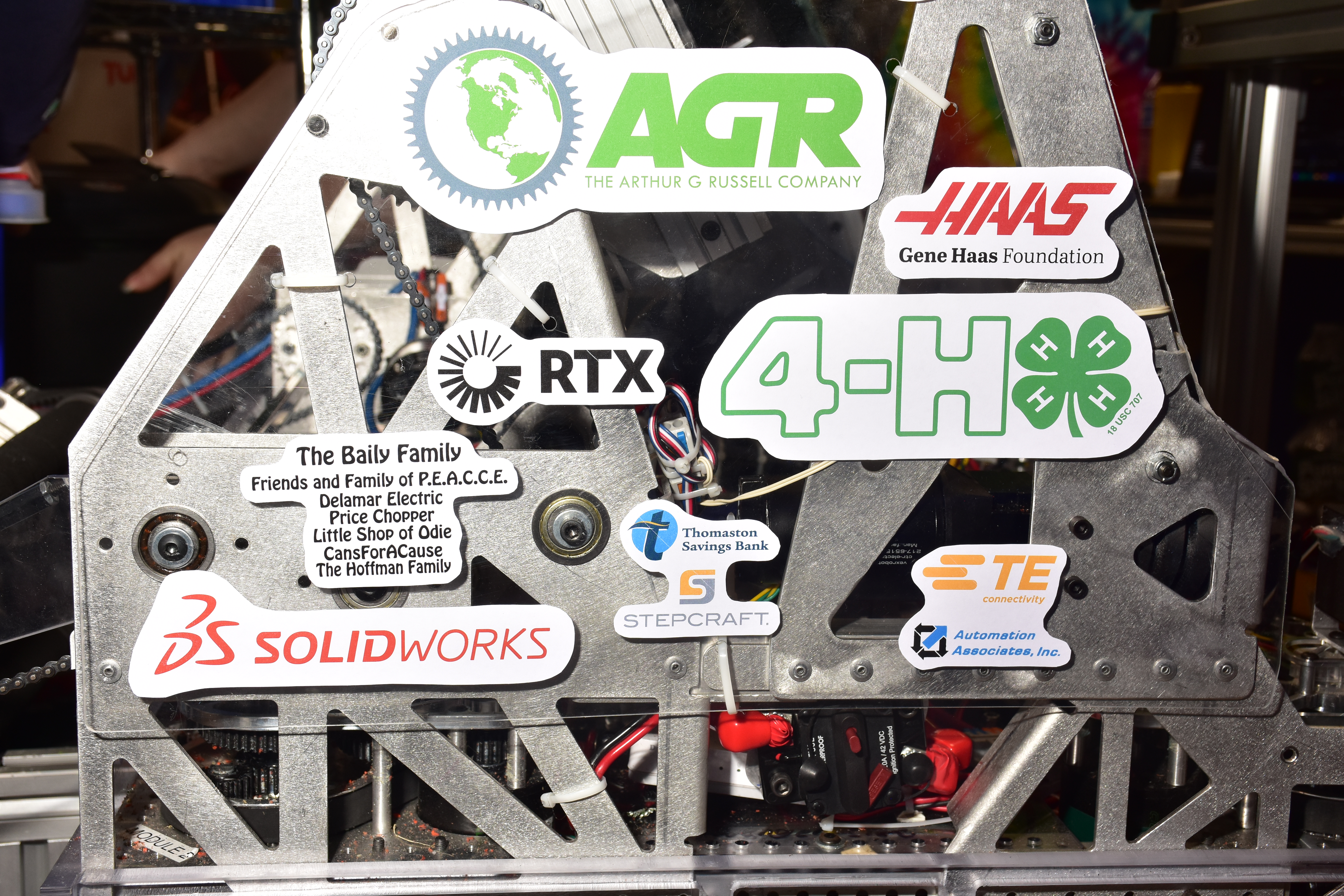
C# is a small, compact swerve drive robot. It’s primary mechanism is a 4-wheel shooter mounted on a pivot. This mechanism allowed C# to score notes into the Speaker (the primary scoring object on the field) from several places. The Pivot that the Shooter was mounted on also allowed us to intake from the human player station (called the Source) directly, without the need of another mechanism. To intake from the ground, we used a virtual four-bar Intake with rollers made out of a very grippy material.
The robot performed quite well, advancing to the New England District Championship; as well as winning the Engineering Inspiration Award at the NE District Waterbury Event and making it to the final-four in the elimination bracket at the NE District Western New England Univeristy Event.
Highest Scoring Match
| Red Alliance | Blue Alliance |
|---|---|